BitBastelei #245f - Haussteuerung mit CAN und Arduino: IO-Module
(24 MB) 00:10:07
2017-07-02 11:02
🛈Die vermutlich komplexeste, aber auch leistungsfähigste Variante in aSysBus: IO-Module. Hierbei werden nicht mehr separate Funktionen geschrieben, sondern nur noch Konfigurationen für Adressen und Pins vergeben. Diese werden im EEPROM abgelegt und können – ganz ohne dem Arduino neu zu programmieren – im Betrieb geändert werden.
CAN-Bus-Library:
https://github.com/adlerweb/CAN_BUS_Shield
aSysBus-Library:
https://github.com/adlerweb/aSysBus
BitBastelei #245e - Haussteuerung mit CAN und Arduino: Eigene Funktionen anbinden
(14 MB) 00:08:05
2017-07-02 11:01
🛈Über „Hooks“ kann man in aSysBus eigene Funktionen mit einem Filter verbinden. Statt selbst das aussortieren der Pakete programmieren zu müssen kann man hier diese Aufgabe der Library übertragen. Trifft später ein Paket ein, welches den angegebenen Daten entspricht, wird die eigene Funktion aufgerufen.
CAN-Bus-Library:
https://github.com/adlerweb/CAN_BUS_Shield
aSysBus-Library:
https://github.com/adlerweb/aSysBus
BitBastelei #245d - Haussteuerung mit CAN und Arduino: Einfacher Knoten
(15 MB) 00:09:45
2017-07-02 11:00
🛈Jetzt geht es ans programmieren: Die Variante „simple“ beschränkt sich auf das nötigste: Den Knoten online bringen, Pakete senden und Empfangen. Programmlogik kann man mit wenigen Befehlen in Arduino selbst entwickeln. Diese Methode eignet sich daher für alle, welche individuelle Steuerungen bauen.
CAN-Bus-Library:
https://github.com/adlerweb/CAN_BUS_Shield
aSysBus-Library:
https://github.com/adlerweb/aSysBus
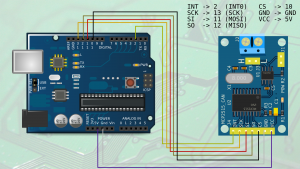
BitBastelei #245c - Haussteuerung mit CAN und Arduino: Installation & Hardware
(24 MB) 00:05:43
2017-07-02 10:31
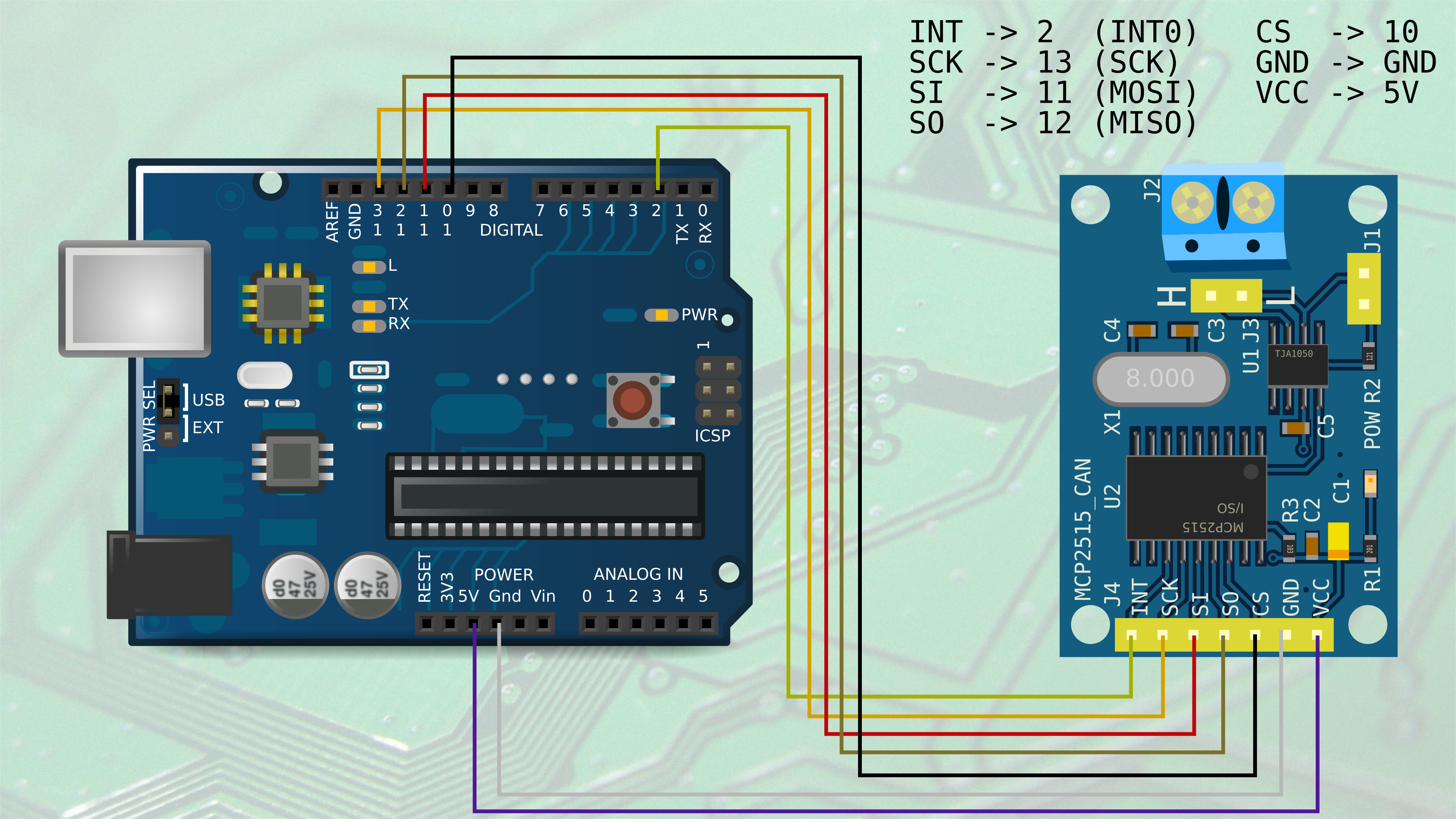
🛈Selbst eine Haussteuerung mit Arduino bauen? Kein Problem. Hier schauen wir wie wir die nötigen Libraries installieren und für wenig Geld passende Hardware zusammenstecken können.
CAN-Bus-Library:
https://github.com/adlerweb/CAN_BUS_Shield
aSysBus-Library:
https://github.com/adlerweb/aSysBus
Bild: https://www.adlerweb.info/blog/wp-content/uploads/2017/07/mcparduino-300×169.png
BitBastelei #245b - Haussteuerung mit CAN und Arduino: Der aSysBus
(19 MB) 00:09:21
2017-07-02 10:30
🛈Nach langem Gebastel ist er da: Der Arduino System Bus (aSysBus). Schauen wir mal, was dahinter steckt, wie die Library aufgebaut ist und was alles unterstützt wird.
CAN-Bus-Library:
https://github.com/adlerweb/CAN_BUS_Shield
https://github.com/Seeed-Studio/CAN_BUS_Shield
aSysBus-Library:
https://github.com/adlerweb/aSysBus
BitBastelei #245a - Haussteuerung mit CAN und Arduino: Was ist Haussteuerung?
(23 MB) 00:10:23
2017-07-02 10:00
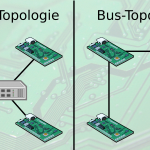
🛈Nach langer Zeit geht es mal wieder um Haussteuerung: Ich habe mein System nun soweit auf Arduino portiert und online gestellt. Aber schauen wir erst mal was überhaupt Haussteuerung ist, warum man eine solche haben möchte, was dagegen spricht und welche Konzepte es gibt.
BitBastelei #153 - Hausbus: Planung & Prototyp
(32 MB) 00:20:58
2015-06-14 10:00
🛈Auch wenn die Temperaturen nicht grade zum Basteln einladen: Etwas Fortschritt gibt es beim Hausbus. Wegen des geringen Preises und der einfachen Anpassbarkeit geht es erst mal auf Arduino-Basis. Da das Protokoll nicht sonderlich komplex ist lässt sich später immer noch auf ARM o.Ä. umstellen. Da die Shields für die angedachten Pro-Minis etwas überdimensioniert sind muss ein eigenes Mini-Shield her. IC-Technisch werde ich mich an iSysBus und den diversen Ardunio-Shields orientieren. Ein Breadboard-Test konnte bereits Steuerbefehle empfangen und senden. Passende PCBs sind inzwischen bestellt, die Schaltpläne und Boarddaten gibt es wenn der erste Prototyp grundsätzlich läuft.



")


{kind=link}
{kind=link}