Wenn es brennt ist es meist ein Vorteil den nächstgelegenen Ausgang zu finden. Um dies zu vereinfachen verfügen viele größere Gebäude über Notbeleuchtungssysteme, welche auch in Gefahrensituationen den Weg zum Ausgang leuchten. Heute werfen wir einen Blick auf das Innenleben einer Leuchtenüberwachung, welche in solchen Notstromsystemen zur Steuerung und Überwachung einzelner Lampen verbaut wird. Auch ein LED-Streifen, welcher in solchen 230V-Lampen zum Einsatz kommt, bekommt einen kleinen Blick. Danke an Christian für die beiden Teile.
Dinge die Sound machen gibt es überall im Regal: Der StarTrek-Türsound von letztens und der Bullshit-Button * bei EEVBlog sind nur einige Beispiele. Aber was, wenn man selbst einen passenden Sound im Kopf hat? Nun, dann kann der JQ8400 * helfen. Dieses kleine Modul hat 4MB Speicher, spielt unter Anderem MP3-Dateien ab und kann per UART einfach von einem µC angesteuert werden. Mit etwas Code hat man so schnell einen eigenen WasAuchImmer-Button, der das Lieblings-Audio-Meme bei jeder Gelegenheit abspielen kann.
Ergänzungen:
12:08 OK, OK, Wenn man falsch shiftet kommt natürlich auch Blödsinn raus. Im Code ist es schon mal korrigiert, da ich es nicht getestet habe aber noch nicht aktiv geschaltet.
Der TS100 ist dank seiner direkt beheizten Spitze ein schnell reagierender und leistungsstarker Lötkolben, das mobile Design liegt aber nicht immer gut in der Hand. Abhilfe verspricht für wenig Geld ein Bausatz, mit dem man sich einen eigenen Lötkolben mit ähnlichen Funktionen aufbauen kann. Als Lötspitzen kommen hierbei die Modelle der T12-Serie zum Einsatz, welche ursprünglich von einem professionellen Fertiggerät stammen.
Das für den Aufbau verwendete Modul ist in mehreren Versionen verfügbar: Jene mit Textdisplay verfügt über einen STM32 und lässt sich mit einer Open Source Firmware betreiben. Ich habe mich für das etwas teurere OLED-Modul entschieden, welches bessere Lesbarkeit bietet, jedoch leider, dank STC-Prozessor, bisher keine alternative Firmware besitzt. Der Preis für die Module liegt, ohne Gehäuse und Netzteil, bei ca. 20€. Spitzen von Drittanbietern sind ab etwa 3€zu haben.
Ein einfacher WLAN-AP für den Heimbereich kostet heute grade mal 20€, für ein Industriegerät der Markenhersteller sind 400€ bis teils über 1000€ keine Seltenheit. Schauen wir mal welche Unterschiede sich zwischen den Preisklassen im Inneren verbergen.
Ergänzung
Über den Reset-Button kann man das Gerät in einen Modus versetzen, in dem es auch als Einzelgerät betrieben werden kann.
Die Source-Codes, welche für eine OpenWRT-Umsetzung hilfreich sein dürften, lassen sich offenbar gegen Porto bei HP auf CD anfordern.
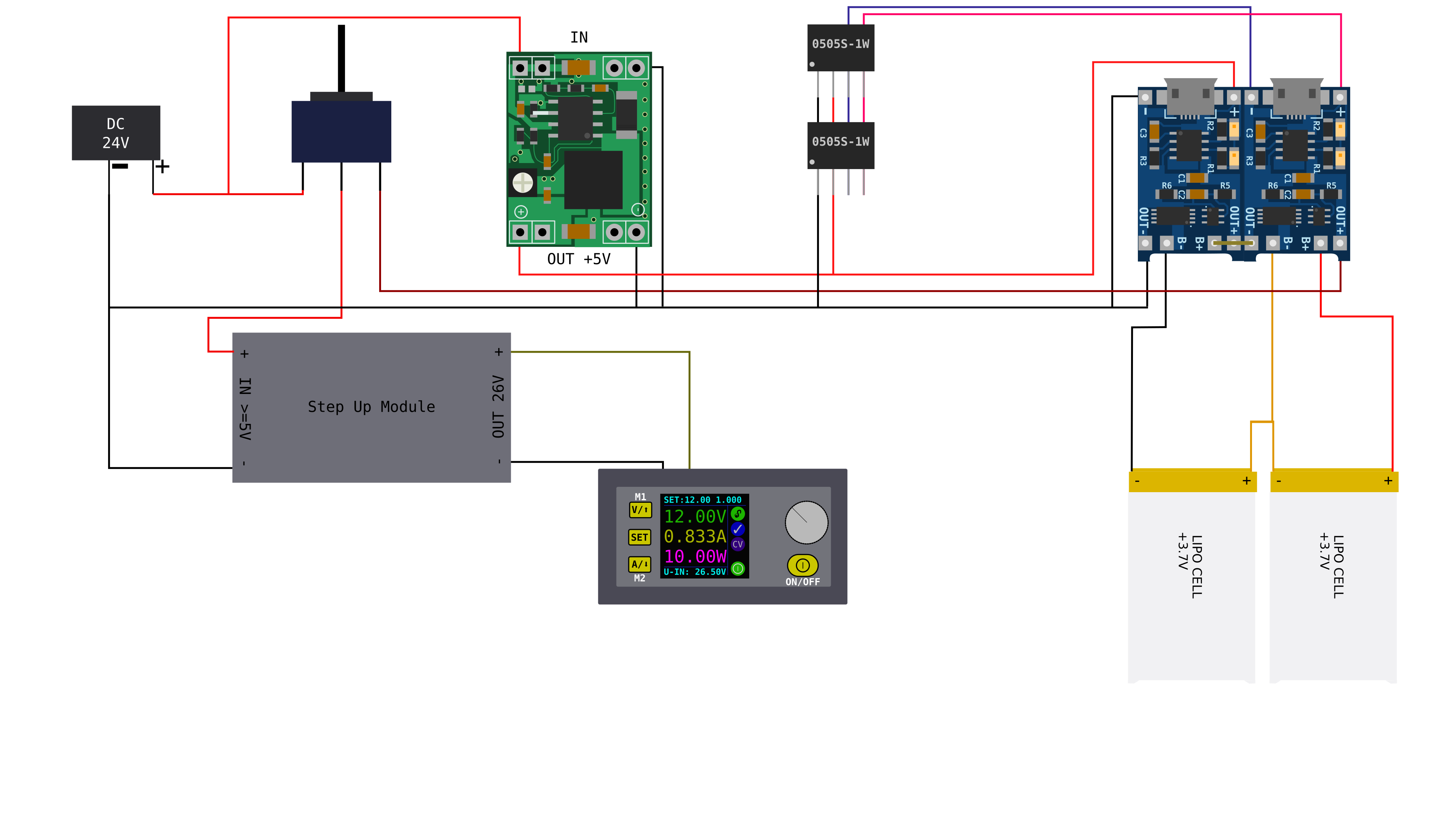
In der ersten Folge zu diesem Projekt habe ich mit dem DPS3005 ein mobiles Labornetzteil gebaut, welches auch unterwegs eine Stromversorgung mit regelbarer Spannung und Strom bietet. Der Platzbedarf ist überschaubar, allerdings war zur Stromversorgung bisher zwingend ein externes Netzteil nötig. Diesmal bekommt die Box zum Abschluss einen internen Akku um auch ohne Steckdose arbeiten zu können. Natürlich inklusive der nötigen Elektronik für einen sicheren Betrieb und die Ladung der Akkus.
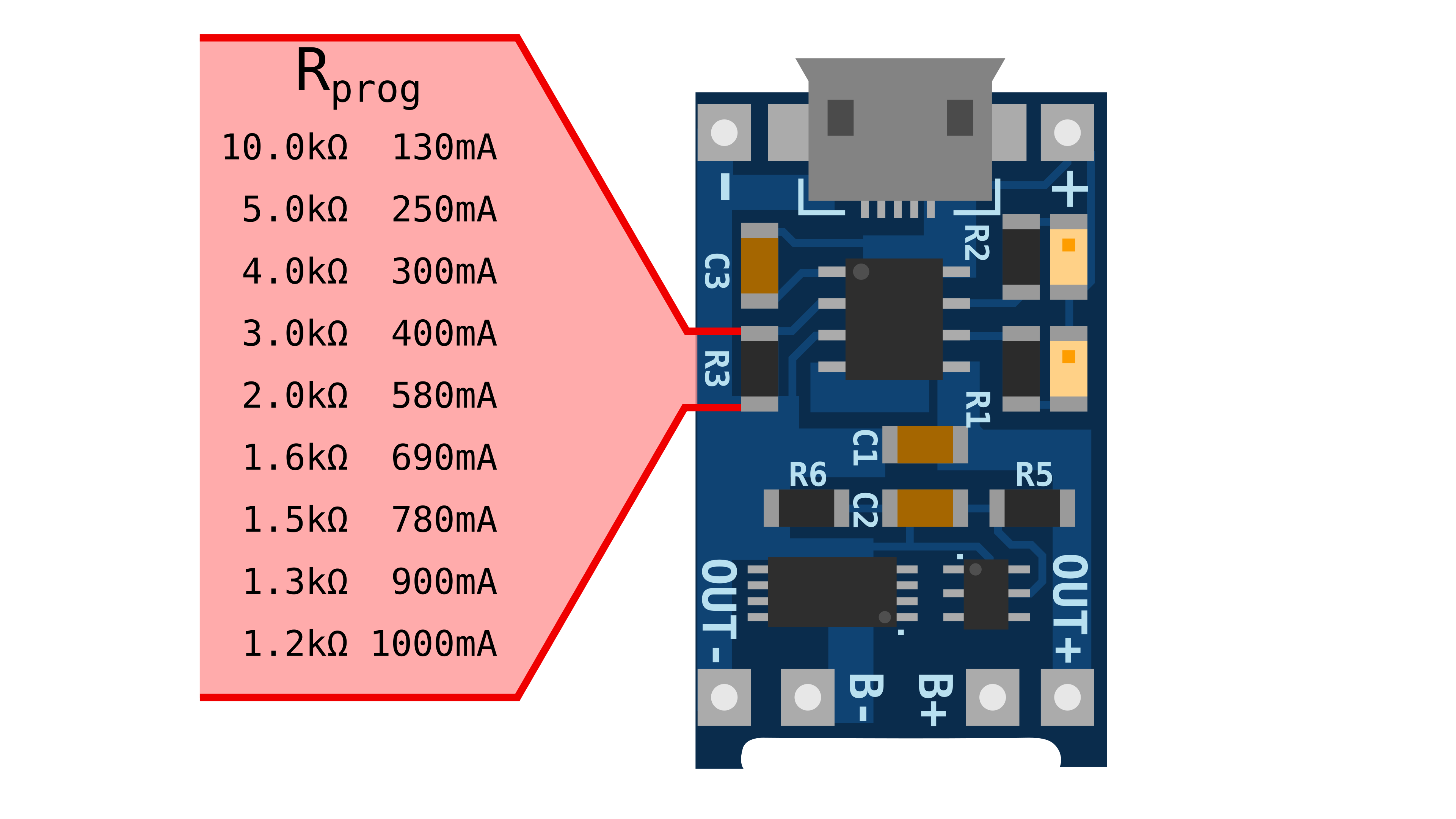
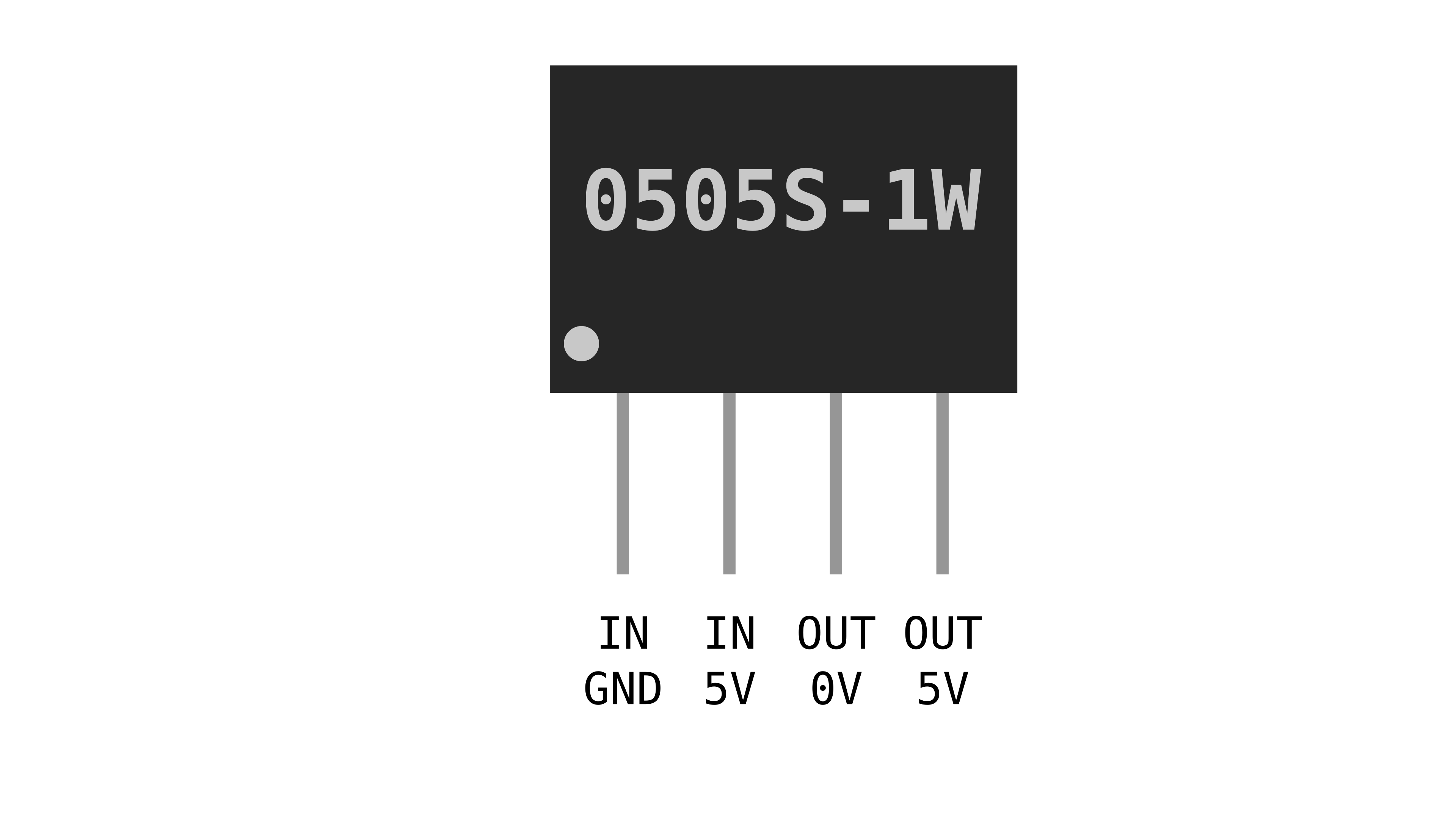
Widerstandswerte zur Stromlimitierung des TP4056Pinbelegung des isolierten DC-DC-Wandlers
Wer die Originalserie aus den ’60ern kennt, dem dürfte dieser rote Kasten bekannt vorkommen: Das Gerät saß neben Türen auf der „Enterprise“. Inzwischen kann man sich dies als Gadget nach Hause holen. Schauen wir mal, was drin steckt.
Ergänzungen
Die Originalserie lief 1966–1969
Ni-Cd ist in der EU seit 2006/2009 für Spielzeug verboten, in den USA werden sie mit Strafgebühren weiter verkauft
Abstände misst man meist mit dem Maßband, dieses lässt sich aber nur schwer an einen Arduino anschließen. Eine Alternative sind Sensormodule wie der HC-SR04, welche die Länge einer Strecke per Ultraschall bestimmen können. Wie diese funktionieren, warum man dazu Zeit messen muss und wie sich die Sensoren mit Arduino verwenden lassen – das schauen wir uns dann in diesem Video an.
SD-Karten sind ein stetiger Quell der Freude. Oder der Fehler. Gerade wenn man Logs oder Datenbanken auf diesen Speichern nutzt gehen diese nach recht kurzer Zeit gerne kaputt. Doch einige, vor allem im Niedrigpreissegment angesiedelte, Karten kommen bereits ab Werk kaputt an und können die aufgedruckte Kapazität technisch gar nicht erreichen. Schauen wir mal, wie man diese betrügerischen Karten erkennt und ob man diese noch irgendwie zumindest für Kleinigkeiten nutzbar machen kann.
Vor Kurzem hatte ich ein RGB-LED-Panel gezeigt, welches auch in Videowänden zum Einsatz kommt. Bei meinen Versuchen mit STM32 zeigte sich schnell, dass das manuelle PWM, welches für Farbmischung notwendig ist, einiges an Ressourcen benötigt. Mittels Raspberry Pi und dem RPi-RGB-LED-Matrix/FlaschenTaschen-Projekt sollte dies nun besser funktionieren.